(Light Detection and Ranging,LiDAR)即激光探测和测距,又称光学雷达,是自动驾驶领域的一种基础感测技术。LIDAR是激光科技与雷达技术的组合,以下以无人机和自动驾驶领域常用的LIDAR-Lite系列为例,介绍LIDAR与Arduino开发板的连接几测距示例。
LiDAR工作原理与通信雷达一样,都是飞行时间测量法(Time of Flight,TOF),只是发射介质采用的是对人畜无害的红外光束(Light Pluses),而不是无线电波。
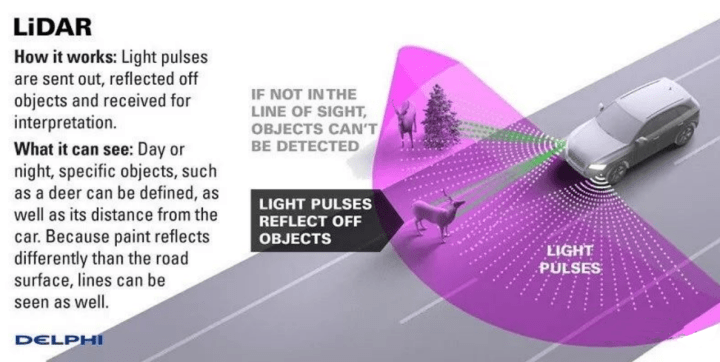
LiDAR通过发射、反射和接收红外光束来探测白天或黑夜下的特定物体及动态数据,甚至由于反射度的不同,车道线和路面也是可以区分开来的。对于车用激光雷达,光速是每秒30万公里,要区分目标厘米级别的精确距离,对传输时间测量分辨率必须做到1纳秒。要如此精确的测量时间,对应的测量系统的成本就很难降低,还需要使用巧妙的方法降低测量难度。
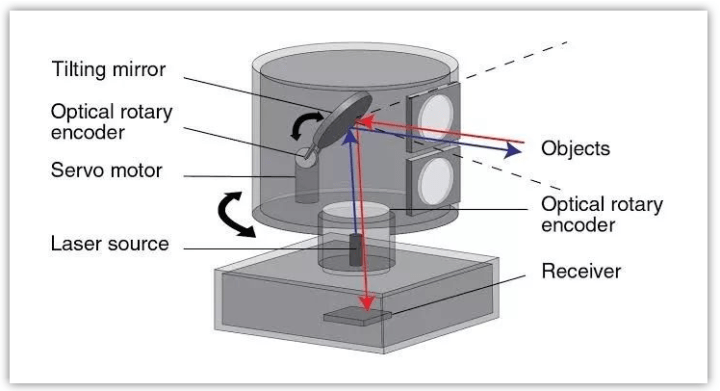
LiDAR系统一般包括激光发射光源、接收器、伺服电机、斜面镜和光学旋转编码器(又称圆光栅)几部分。通过旋转的机械镜面测量激光发出和收到回波的时间差,LiDAR可确定目标的方位和距离。由于激光雷达主动发射激光,因此受环境光变化的影响小,测距精确。

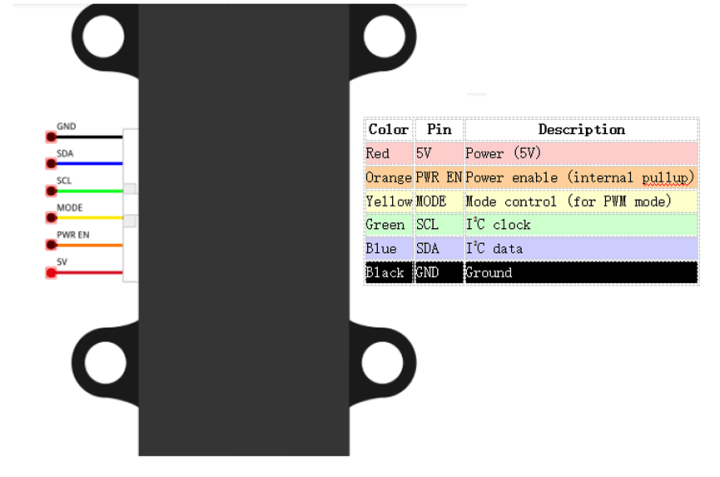
其中,LIDAR-Lite前方有两个镜筒,里面分别是激光发射器和接收器,用以发现和检测目标。侧面的电气接口用来连接6-wire电缆。底部的4个安装孔用来固定传感器,螺丝规格为 #6 or M3.5。 LIDAR-Lite有6个引线,用来与控制板通信。其功能分别为: 红色:5V,连接5V电源。 橙色:PWR EN,电源使能(内部上拉) :MODE,模式控制(用于PWM模式) 绿色:SCL,I2C时钟 蓝色:SDA,I2C数据 黑色:GND,接地线
由于LIDAR-Lite工作于4.5V to 5.5V,消耗的连续电流高达135mA (待机状态为105mA),为了维持稳定工作,需要在5V电源和GND之间连接一个680μF电容器,并尽量靠近LIDAR传感器单元。 用于SCL和SD线C总线kΩ,如果链路较长或系统器件较多,可改用较小阻值的电阻元件。当线路长度超过允许长度时,可采用总线扩展器。
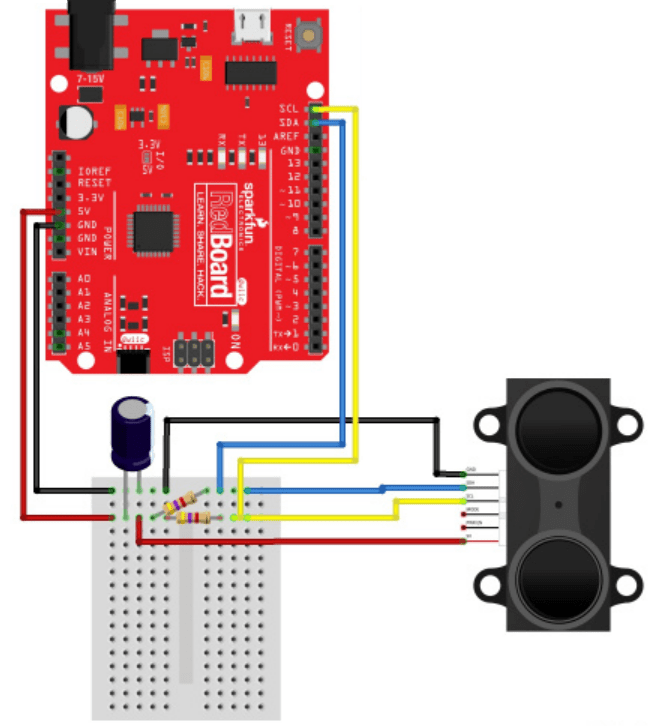
按照电路图将LIDAR传感器与RedBoard或者其他Arduino兼容开发板连接,IDAR-Lite就可以通过I2C总线来测量距离了。
连接好电路图后,用USB电缆将LiDAR连接到PC,就可以安装专门的Arduino库文件了。这很简单,打开Arduino Library Manager按照提示操作就OK了。如果这些库文件没有链接到Arduino IDE,就需要手动操作,过程也不复杂。

如果Serial Monitor显示有误(nack error),大部分情况是I2C总线C总线对接触不良非常敏感,最好是事先在面包板上焊接几根导线出来。当然,也可能是上拉电阻太大了,可换个小一点阻值的试试,直到正常测量为止。
ca88手机登录地址
